工業級教學應用六軸機械手臂

以太網通訊
· 基於(yu) 以太網通訊,微型機器人提供了一個(ge) 可擴展的分布式控製係統,
它也是以太網相關(guan) 培訓的一個(ge) 工具。
工業(ye) 機器人設計
· 參照一般工業(ye) 的6軸鉸接式機器人設計,微型機器人的建造方式與(yu) 此相同。它的裸機機械結構易於(yu) 對工業(ye) 機器人的結構的學習(xi)
開放的開發環境
· 微型機器人附帶一個(ge) 實用工具,可以直接操作機器人。Windows平台還提供機器人控製API,用戶可以利用其開放性來開發任意類型的機器人應用程序
主要特點
- 基於(yu) 以太網
- 設計緊湊
- 適用於(yu) 教育行業(ye)
- 標準6軸鉸接式機器人
- 控製櫃
- 機器人控製API
- 關(guan) 節型6軸機器人
- 開放式機器人控製器
產(chan) 品規格
機器手臂
自由度: 6
Payload: 1kg
驅動係統: 以太網閉環步進器
位置反饋: 增量編碼器
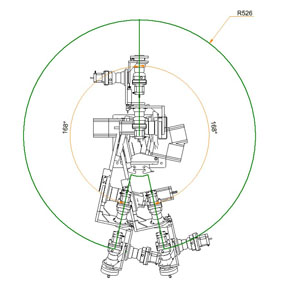
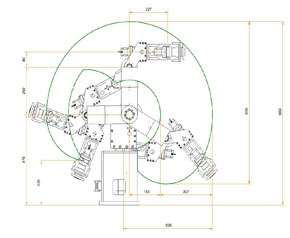
操作範圍: 590mm (maximum)
- J1: ±175°
- J2: +110°~ -92°
- J3: +63°~ -153°
- J4: ±175°
- J5: ±92°
- J6: ±180°
再現性: ±0.12mm
重量: arm 30kg
輸入電壓: 單相 100~240Vac
控製器
DI/O: 15-ch DI/16-ch DO (DB37 接頭)
1 x Intel® GbE LAN port 1 x VGA
2 x USB 2.0 (外置)
1 x USB 3.0, 1 x USB 2.0 (控製櫃內(nei) )
1 x 緊急製動端
重量: 控製櫃 20kg
軟件
NexGRC 運行時(機器人控製運行時)
NexMotion studio (配置程序)標準的機器人動作控製功能
支持C\C++, C# 和 VB.Net用戶編程
OS: WES7
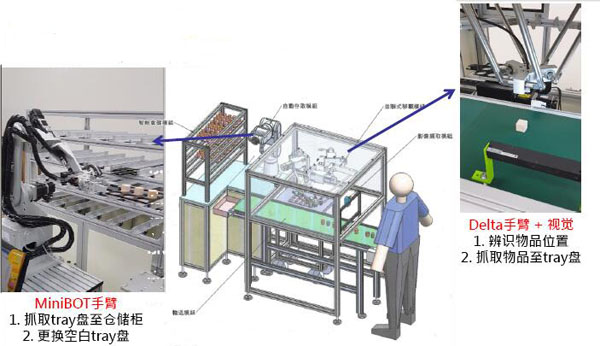
- 智慧產(chan) 線示範線
;){kind=link}